














 Vlad Krasen
Vlad Krasen 0
0  5236
5236 1529
1529
 Mikroprocesory są sercem wszystkich komputerów. Jorg Greuel / Getty Images
Mikroprocesory są sercem wszystkich komputerów. Jorg Greuel / Getty Images -Komputer, którego używasz do czytania tej strony, używa rozszerzenia mikroprocesor wykonać swoją pracę. Mikroprocesor jest sercem każdego normalnego komputera, niezależnie od tego, czy jest to komputer stacjonarny, serwer, czy laptop. Mikroprocesor, którego używasz, może być Pentium, K6, PowerPC, Sparc lub dowolnym z wielu innych marek i typów mikroprocesorów, ale wszystkie robią mniej więcej to samo w mniej więcej taki sam sposób.
Mikroprocesor - znany również jako plik procesor lub jednostka centralna - to kompletny silnik obliczeniowy, który jest wytwarzany na pojedynczym chipie. Pierwszym mikroprocesorem był Intel 4004, wprowadzony w 1971 roku. 4004 nie był zbyt wydajny - jedyne, co mógł zrobić, to dodawać i odejmować, a mógł to robić tylko 4 bity na raz. Ale to było niesamowite, że wszystko było na jednym chipie. Przed 4004 inżynierowie budowali komputery albo z kolekcji chipów, albo z elementów dyskretnych (tranzystory połączone pojedynczo). Model 4004 zasilał jeden z pierwszych przenośnych kalkulatorów elektronicznych.
- Jeśli kiedykolwiek zastanawiałeś się, co robi mikroprocesor w Twoim komputerze, lub jeśli kiedykolwiek zastanawiałeś się nad różnicami między typami mikroprocesorów, czytaj dalej. W tym artykule dowiesz się, jak dość proste techniki logiki cyfrowej pozwalają komputerowi wykonywać swoją pracę, niezależnie od tego, czy gra w grę, czy sprawdza pisownię w dokumencie!
Zawartość- Postęp mikroprocesora: Intel
- Logika mikroprocesora
- Pamięć mikroprocesora
- Instrukcje dotyczące mikroprocesora
- Wydajność i trendy mikroprocesora
- 64-bitowe mikroprocesory
 Intel 8080 był pierwszym mikroprocesorem w komputerze domowym.
Intel 8080 był pierwszym mikroprocesorem w komputerze domowym. Pierwszym mikroprocesorem, który stał się komputerem domowym, był Intel 8080, kompletny 8-bitowy komputer w jednym chipie, wprowadzony w 1974 roku. Pierwszym mikroprocesorem, który zrobił prawdziwy plusk na rynku, był Intel 8088, wprowadzony w 1979 roku i włączony na komputer IBM PC (który pojawił się po raz pierwszy około 1982 roku). Jeśli jesteś zaznajomiony z rynkiem PC i jego historią, wiesz, że rynek PC przeniósł się z 8088 na 80286, 80386, 80486, Pentium, Pentium II, Pentium III, Pentium 4. Wszystko to mikroprocesory są produkowane przez firmę Intel i wszystkie są ulepszeniami podstawowego projektu 8088. Pentium 4 może wykonać każdy fragment kodu, który działał na oryginalnym 8088, ale robi to około 5000 razy szybciej!
Od 2004 roku Intel wprowadził mikroprocesory z wieloma rdzeniami i milionami tranzystorów. Ale nawet te mikroprocesory przestrzegają tych samych ogólnych zasad, co wcześniejsze chipy.
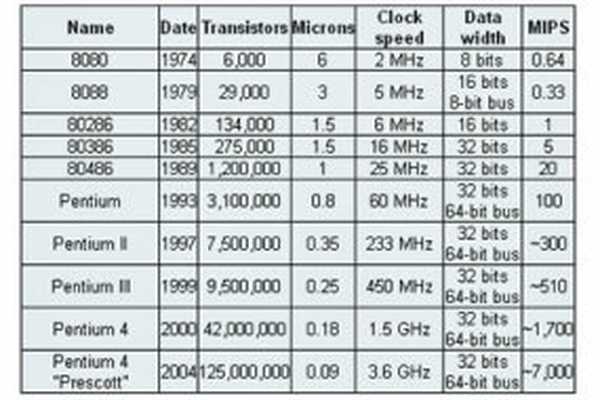 Oto różnice między różnymi procesorami, które Intel wprowadzał na przestrzeni lat. Opracowano na podstawie Skróconej instrukcji obsługi mikroprocesorów Intel i wyników testów porównawczych TSCP
Oto różnice między różnymi procesorami, które Intel wprowadzał na przestrzeni lat. Opracowano na podstawie Skróconej instrukcji obsługi mikroprocesorów Intel i wyników testów porównawczych TSCP Dodatkowe informacje o tabeli na tej stronie:
- Plik data to rok, w którym po raz pierwszy wprowadzono procesor. Wiele procesorów jest ponownie wprowadzanych z wyższą częstotliwością taktowania przez wiele lat po pierwotnej dacie wydania.
- Tranzystory to liczba tranzystorów w chipie. Widać, że liczba tranzystorów w pojedynczym chipie stale rosła na przestrzeni lat.
- Mikrony jest szerokością w mikronach najmniejszego drutu w chipie. Dla porównania, ludzki włos ma grubość 100 mikronów. W miarę zmniejszania się rozmiaru funkcji na chipie rośnie liczba tranzystorów.
- Szybkośc zegara to maksymalna prędkość taktowania chipa. Szybkość zegara będzie bardziej sensowna w następnej sekcji.
- Szerokość danych jest szerokością ALU. 8-bitowa jednostka ALU może dodawać / odejmować / mnożyć / itd. dwie liczby 8-bitowe, podczas gdy 32-bitowa jednostka ALU może manipulować liczbami 32-bitowymi. 8-bitowa jednostka ALU musiałaby wykonać cztery instrukcje, aby dodać dwie 32-bitowe liczby, podczas gdy 32-bitowa jednostka ALU może to zrobić w jednej instrukcji. W wielu przypadkach zewnętrzna magistrala danych ma taką samą szerokość jak ALU, ale nie zawsze. 8088 miał 16-bitową jednostkę ALU i 8-bitową magistralę, podczas gdy nowoczesne Pentium pobierają dane 64-bitowe naraz dla swoich 32-bitowych jednostek ALU.
- MIPS oznacza „miliony instrukcji na sekundę” i jest przybliżoną miarą wydajności procesora. Nowoczesne procesory mogą robić tak wiele różnych rzeczy, że oceny MIPS tracą wiele ze swojego znaczenia, ale z tej kolumny można uzyskać ogólne pojęcie o względnej mocy procesorów.
Z tej tabeli można zobaczyć, że ogólnie istnieje związek między szybkością zegara a MIPS. Maksymalna szybkość zegara jest funkcją procesu produkcyjnego i opóźnień w chipie. Istnieje również zależność między liczbą tranzystorów a MIPS. Na przykład 8088 taktowany zegarem 5 MHz, ale wykonywany tylko z prędkością 0,33 MIPS (około jednej instrukcji na 15 cykli zegara). Nowoczesne procesory mogą często wykonywać dwie instrukcje na cykl zegara. Ta poprawa jest bezpośrednio związana z liczbą tranzystorów w chipie i będzie miała większy sens w następnej sekcji.
Co to jest chip?ZA żeton jest również nazywany układ scalony. Zwykle jest to mały, cienki kawałek krzemu, na którym wytrawiono tranzystory tworzące mikroprocesor. Chip może mieć rozmiar nawet jednego cala i może zawierać dziesiątki milionów tranzystorów. Prostsze procesory mogą składać się z kilku tysięcy tranzystorów wyrytych na chipie o powierzchni zaledwie kilku milimetrów kwadratowych.
 Procesor Intel Pentium 4 Zdjęcie dzięki uprzejmości Intel Corporation
Procesor Intel Pentium 4 Zdjęcie dzięki uprzejmości Intel Corporation Aby zrozumieć, jak działa mikroprocesor, warto zajrzeć do środka i poznać logikę użytą do jego stworzenia. W trakcie możesz również dowiedzieć się o język programowania -- język ojczysty mikroprocesora - i wiele rzeczy, które inżynierowie mogą zrobić, aby zwiększyć szybkość procesora.
Mikroprocesor wykonuje zbiór instrukcji maszynowych, które mówią procesorowi, co ma robić. Na podstawie instrukcji mikroprocesor wykonuje trzy podstawowe rzeczy:
- Korzystając ze swojej jednostki ALU (arytmetyczno-logicznej), mikroprocesor może wykonywać operacje matematyczne, takie jak dodawanie, odejmowanie, mnożenie i dzielenie. Nowoczesne mikroprocesory zawierają kompletne procesory zmiennoprzecinkowe, które mogą wykonywać niezwykle wyrafinowane operacje na dużych liczbach zmiennoprzecinkowych.
- Mikroprocesor może przenosić dane z jednej lokalizacji pamięci do innej.
- Mikroprocesor może podejmować decyzje i przeskakiwać do nowego zestawu instrukcji na podstawie tych decyzji.
Mogą istnieć bardzo wyrafinowane rzeczy, które wykonuje mikroprocesor, ale to są jego trzy podstawowe czynności. Poniższy diagram przedstawia niezwykle prosty mikroprocesor zdolny do wykonania tych trzech rzeczy:
To jest tak proste, jak robi to mikroprocesor. Ten mikroprocesor ma:
- Na magistrala adresowa (o szerokości 8, 16 lub 32 bitów), który wysyła adres do pamięci
- ZA magistrala danych (o szerokości 8, 16 lub 32 bitów), który może wysyłać dane do pamięci lub odbierać dane z pamięci
- Na R & D (Przeczytaj i WR (write), aby poinformować pamięć, czy chce ustawić lub pobrać adresowaną lokalizację
- ZA linia zegara który pozwala na sekwencję impulsów zegara procesora
- ZA resetuj linię która resetuje licznik programu do zera (lub cokolwiek) i restartuje wykonywanie
Załóżmy, że w tym przykładzie zarówno magistrala adresowa, jak i magistrala danych mają szerokość 8 bitów.
Oto elementy tego prostego mikroprocesora:
- Rejestry A, B i C to po prostu zatrzaski wykonane z przerzutników. (Więcej informacji można znaleźć w sekcji „Zatrzaski wyzwalane przez zbocze” w artykule Jak działa logika boolowska).
- Zatrzask adresu jest podobny do rejestrów A, B i C..
- Licznik programu to zatrzask z dodatkową możliwością zwiększania o 1, gdy zostaniesz o to poproszony, a także resetowania do zera, gdy zostanie to nakazane.
- ALU może być tak proste, jak sumator 8-bitowy (zobacz sekcję o sumatorach w Jak działa logika boolowska, aby uzyskać szczegółowe informacje) lub może być w stanie dodawać, odejmować, mnożyć i dzielić wartości 8-bitowe. Załóżmy, że to drugie tutaj.
- Rejestr testowy to specjalny zatrzask, który może przechowywać wartości z porównań wykonanych w jednostce ALU. ALU może normalnie porównać dwie liczby i określić, czy są one równe, czy jedna jest większa od drugiej, itp. Rejestr testowy może również normalnie przechowywać bit przeniesienia z ostatniego etapu sumatora. Przechowuje te wartości w przerzutnikach, a następnie dekoder instrukcji może wykorzystać te wartości do podejmowania decyzji.
- Na diagramie znajduje się sześć pól oznaczonych jako „3-Stan”. To są bufory trójstanowe. Bufor trójstanowy może przepuścić 1, 0 lub może zasadniczo odłączyć swoje wyjście (wyobraź sobie przełącznik, który całkowicie odłącza linię wyjściową od przewodu, do którego zmierza wyjście). Bufor trójstanowy pozwala na podłączenie wielu wyjść do przewodu, ale tylko jedno z nich może faktycznie wprowadzić 1 lub 0 do linii.
- Rejestr instrukcji i dekoder instrukcji są odpowiedzialne za sterowanie wszystkimi pozostałymi komponentami.
Chociaż nie są one pokazane na tym schemacie, istniałyby linie sterujące z dekodera instrukcji, które:
- Powiedz rejestrowi A, aby zatrzasnął wartość aktualnie znajdującą się na magistrali danych
- Powiedz rejestrowi B, aby zatrzasnął wartość aktualnie znajdującą się na magistrali danych
- Powiedz rejestrowi C, aby zatrzasnął wartość aktualnie wysyłaną przez ALU
- Poinformuj rejestr licznika programu, aby zatrzasnął wartość aktualnie na magistrali danych
- Powiedz rejestrowi adresowemu, aby zatrzasnął wartość aktualnie na magistrali danych
- Powiedz rejestrowi instrukcji, aby zatrzasnął wartość aktualnie znajdującą się na magistrali danych
- Powiedz licznikowi programu, aby zwiększał
- Powiedz licznikowi programu, aby zresetował się do zera
- Aktywuj dowolny z sześciu buforów trójstanowych (sześć oddzielnych linii)
- Powiedz ALU, jaką operację ma wykonać
- Powiedz rejestrowi testowemu, aby zatrzasnął bity testowe ALU
- Aktywuj linię RD
- Aktywuj linię WR
Do dekodera instrukcji przychodzą bity z rejestru testowego i linii zegarowej, a także bity z rejestru instrukcji.
 Układ ROM
Układ ROM W poprzednim rozdziale omówiono magistrale adresowe i danych, a także linie RD i WR. Te autobusy i linie łączą się albo z pamięcią RAM, albo z pamięcią ROM - ogólnie z obydwoma. W naszym przykładowym mikroprocesorze mamy magistralę adresową o szerokości 8 bitów i magistralę danych o szerokości 8 bitów. Oznacza to, że mikroprocesor może adresować (28) 256 bajtów pamięci i może jednocześnie odczytywać lub zapisywać 8 bitów pamięci. Załóżmy, że ten prosty mikroprocesor ma 128 bajtów pamięci ROM, zaczynając od adresu 0 i 128 bajtów pamięci RAM, zaczynając od adresu 128.
ROM oznacza pamięć tylko do odczytu. Chip ROM jest zaprogramowany z trwałym gromadzeniem wstępnie ustawionych bajtów. Magistrala adresowa informuje układ ROM, który bajt pobrać i umieścić na magistrali danych. Kiedy linia RD zmienia stan, układ ROM prezentuje wybrany bajt na szynie danych.
RAM oznacza pamięć o dostępie swobodnym. Pamięć RAM zawiera bajty informacji, a mikroprocesor może odczytywać lub zapisywać te bajty w zależności od tego, czy sygnalizowana jest linia RD lub WR. Jednym z problemów z dzisiejszymi chipami RAM jest to, że zapominają o wszystkim, gdy wyłącza się zasilanie. Dlatego komputer potrzebuje pamięci ROM.
 Układ RAM
Układ RAM Nawiasem mówiąc, prawie wszystkie komputery zawierają pewną ilość pamięci ROM (możliwe jest stworzenie prostego komputera, który nie zawiera pamięci RAM - wiele mikrokontrolerów robi to, umieszczając garść bajtów pamięci RAM na samym chipie procesora - ale generalnie niemożliwe do utworzenia taki, który nie zawiera pamięci ROM). Na komputerze pamięć ROM nosi nazwę BIOS (podstawowy system wejścia / wyjścia). Po uruchomieniu mikroprocesor rozpoczyna wykonywanie instrukcji znalezionych w systemie BIOS. Instrukcje systemu BIOS wykonują takie czynności, jak testowanie sprzętu w komputerze, a następnie przechodzą do dysku twardego w celu pobrania pliku sektor rozruchowy (zobacz Jak działają dyski twarde, aby uzyskać szczegółowe informacje). Ten sektor rozruchowy to kolejny mały program, a BIOS przechowuje go w pamięci RAM po odczytaniu go z dysku. Następnie mikroprocesor rozpoczyna wykonywanie instrukcji sektora rozruchowego z pamięci RAM. Program sektora rozruchowego powie mikroprocesorowi, aby pobierał coś innego z dysku twardego do pamięci RAM, co mikroprocesor następnie wykonuje i tak dalej. W ten sposób mikroprocesor ładuje i wykonuje cały system operacyjny.
Nawet niesamowicie prosty mikroprocesor pokazany w poprzednim przykładzie będzie miał dość duży zestaw instrukcji, które może wykonać. Zbiór instrukcji jest implementowany jako wzorce bitowe, z których każdy ma inne znaczenie po załadowaniu do rejestru instrukcji. Ludzie nie są szczególnie dobrzy w zapamiętywaniu wzorów bitowych, więc zdefiniowano zestaw krótkich słów, które reprezentują różne wzory bitów. Ten zbiór słów nosi nazwę język programowania procesora. Na monter potrafi bardzo łatwo przetłumaczyć słowa na ich wzory bitowe, a następnie wyjście asemblera jest umieszczane w pamięci, aby mikroprocesor mógł wykonać.
Oto zestaw instrukcji języka asemblera, które projektant może utworzyć dla prostego mikroprocesora w naszym przykładzie:
- LOADA mem - Załaduj rejestr A z adresu pamięci
- LOADB mem - Załaduj rejestr B z adresu pamięci
- CONB con - Załaduj stałą wartość do rejestru B.
- SAVEB mem - Zapisz rejestr B pod adresem pamięci
- SAVEC mem - Zapisz rejestr C pod adresem pamięci
- DODAJ - Dodaj A i B i zapisz wynik w C.
- POD - Odejmij A i B i zapisz wynik w C.
- MUL - Pomnóż A i B i zapisz wynik w C.
- DIV - Podzielić A i B i zapisać wynik w C.
- COM - Porównaj A i B i zapisz wynik w teście
- Adres JUMP - Przejdź do adresu
- Adres JEQ - Skocz, jeśli równa się, do adresu
- JNEQ addr - Skocz, jeśli nie jest równy, do adresu
- Adres JG - Skocz, jeśli jest większy niż, do adresu
- Adres JGE - Skocz, jeśli jest większy lub równy, do adresu
- JL adr - Skocz, jeśli mniej niż, do adresu
- Adres JLE - Skocz, jeśli jest mniejszy lub równy, do adresu
- ZATRZYMAĆ - Zatrzymaj wykonywanie
Jeśli przeczytałeś, jak działa programowanie w C, to wiesz, że ten prosty fragment kodu w C obliczy silnię z 5 (gdzie silnia z 5 = 5! = 5 * 4 * 3 * 2 * 1 = 120):
a = 1; f = 1; while (a <= 5) f = f * a; a = a + 1;
Pod koniec wykonywania programu zmienna fa zawiera silnię 5.
Język programowania
ZA Kompilator C. tłumaczy ten kod C na język asemblera. Zakładając, że pamięć RAM zaczyna się od adresu 128 w tym procesorze, a ROM (który zawiera program w języku asemblerowym) zaczyna się od adresu 0, to dla naszego prostego mikroprocesora język asemblera może wyglądać następująco:
// Załóżmy, że a jest pod adresem 128 // Załóżmy, że F znajduje się pod adresem 1290 CONB 1 // a = 1; 1 SAVEB 1282 CONB 1 // f = 1; 3 SAVEB 1294 LOADA 128 // jeśli a> 5 przeskocz do 175 CONB 56 COM7 JG 178 LOADA 129 // f = f * a; 9 LOADB 12810 MUL11 SAVEC 12912 LOADA 128 // a = a + 1; 13 CONB 114 ADD15 SAVEC 12816 JUMP 4 // pętla z powrotem do if17 STOP
ROM
Więc teraz pytanie brzmi: „Jak wszystkie te instrukcje wyglądają w pamięci ROM?” Każda z tych instrukcji asemblera musi być reprezentowana przez liczbę binarną. Dla uproszczenia załóżmy, że każda instrukcja języka asemblera ma przypisany unikalny numer, na przykład:
- LOADA - 1
- LOADB - 2
- CONB - 3
- SAVEB - 4
- Pamięć SAVEC - 5
- DODAJ - 6
- SUB - 7
- MUL - 8
- DIV - 9
- COM - 10
- Adres JUMP - 11
- Adres JEQ - 12
- Adres JNEQ - 13
- Adres JG - 14
- Adres JGE - 15
- Adres JL - 16
- Adres JLE - 17
- STOP - 18
Liczby są znane jako kody operacyjne. W ROMie nasz mały program wyglądałby tak:
// Załóżmy, że a jest pod adresem 128 // Załóżmy, że F jest pod adresem 129Addr kod operacji / wartość 0 3 // CONB 11 12 4 // SAVEB 1283 1284 3 // CONB 15 16 4 // SAVEB 1297 1298 1 // LOADA 1289 12810 3 // CONB 511512 10 // COM13 14 // JG 1714 3115 1 // LOADA 12916 12917 2 // LOADB 12818 12819 8 // MUL20 5 // SAVEC 12921 12922 1 // LOADA 12823 12824 3 // CONB 125126 6 // ADD27 5 // SAVEC 12828 12829 11 // JUMP 430831 18 // STOP
Możesz zobaczyć, że siedem linii kodu C stało się 18 liniami języka asemblera, a to stało się 32 bajtami w pamięci ROM.
Rozszyfrowanie
Dekoder instrukcji musi przekształcić każdy z opkodów w zestaw sygnałów, które sterują różnymi komponentami wewnątrz mikroprocesora. Weźmy instrukcję ADD jako przykład i zobaczmy, co musi zrobić:
- Podczas pierwszego cyklu zegara musimy faktycznie załadować instrukcję. Dlatego dekoder instrukcji musi: aktywować bufor trójstanowy dla licznika programu aktywować linię RD aktywować bufor trójstanowy danych wejściowych zablokować instrukcję w rejestrze instrukcji
- Podczas drugiego cyklu zegara dekodowana jest instrukcja ADD. To musi zrobić bardzo niewiele: ustawić działanie ALU na dodatkowe zatrzaśnięcie wyjścia ALU do rejestru C
- Podczas trzeciego cyklu zegara licznik programu jest zwiększany (teoretycznie może to nakładać się na drugi cykl zegara).
Każda instrukcja może zostać podzielona na zestaw sekwencyjnych operacji, takich jak te, które manipulują elementami mikroprocesora we właściwej kolejności. Niektóre instrukcje, takie jak ta instrukcja ADD, mogą zająć dwa lub trzy cykle zegarowe. Inne mogą zająć pięć lub sześć cykli zegarowych.
Liczba tranzystory dostępne ma ogromny wpływ na wydajność procesora. Jak widać wcześniej, wykonanie typowej instrukcji w procesorze takim jak 8088 wymagało 15 cykli zegara. Ze względu na konstrukcję mnożnika, wykonanie jednego mnożenia 16-bitowego na 8088 zajęło około 80 cykli. Dzięki większej liczbie tranzystorów możliwe stają się znacznie mocniejsze mnożniki zdolne do szybkości pojedynczego cyklu..
Więcej tranzystorów pozwala również na technologię o nazwie rurociągi. W architekturze potokowej wykonywanie instrukcji nakłada się. Tak więc, nawet jeśli wykonanie każdej instrukcji może zająć pięć cykli zegarowych, może istnieć pięć instrukcji na różnych etapach wykonania jednocześnie. W ten sposób wygląda na to, że jedna instrukcja kończy każdy cykl zegara.
Wiele nowoczesnych procesorów ma wiele dekoderów instrukcji, każdy z własnym potokiem. Pozwala to na wiele strumieni instrukcji, co oznacza, że więcej niż jedna instrukcja może zakończyć się podczas każdego cyklu zegara. Ta technika może być dość skomplikowana w realizacji, więc wymaga wielu tranzystorów.
Trendy
Trend w projektowaniu procesorów dotyczył przede wszystkim w pełni 32-bitowych jednostek ALU z wbudowanymi szybkimi procesorami zmiennoprzecinkowymi i potokowym wykonywaniem wielu strumieni instrukcji. Najnowszą rzeczą w projektowaniu procesorów są 64-bitowe jednostki ALU i oczekuje się, że ludzie będą mieć te procesory w swoich domowych komputerach w następnej dekadzie. Pojawiła się również tendencja do stosowania specjalnych instrukcji (takich jak instrukcje MMX), które czynią niektóre operacje szczególnie wydajnymi, oraz dodawania sprzętowej obsługi pamięci wirtualnej i buforowania L1 w układzie procesora. Wszystkie te trendy zwiększają liczbę tranzystorów, prowadząc do wielomilionowych mocy dostępnych obecnie. Te procesory mogą wykonać około miliarda instrukcji na sekundę!
 Zdjęcie dzięki uprzejmości AMD
Zdjęcie dzięki uprzejmości AMD Sześćdziesiąt czterobitowe procesory są z nami od 1992 roku, aw XXI wieku zaczęły wchodzić do głównego nurtu. Zarówno Intel, jak i AMD wprowadziły 64-bitowe chipy, a Mac G5 ma 64-bitowy procesor. Sześćdziesiąt czterobitowe procesory mają 64-bitowe jednostki ALU, 64-bitowe rejestry, 64-bitowe magistrale i tak dalej.
Jednym z powodów, dla których świat potrzebuje 64-bitowych procesorów, jest ich powiększone przestrzenie adresowe. Trzydziestodwubitowe chipy są często ograniczone do maksymalnie 2 GB lub 4 GB dostępu do pamięci RAM. To brzmi bardzo dużo, biorąc pod uwagę, że większość komputerów domowych używa obecnie tylko 256 MB do 512 MB pamięci RAM. Jednak limit 4 GB może stanowić poważny problem dla maszyn serwerowych i maszyn z dużymi bazami danych. Nawet komputery domowe zaczną wkrótce uderzać w limit 2 GB lub 4 GB, jeśli obecne trendy się utrzymają. 64-bitowy chip nie ma żadnego z tych ograniczeń, ponieważ 64-bitowa przestrzeń adresowa pamięci RAM jest zasadniczo nieskończona w przewidywalnej przyszłości - 2 ^ 64 bajty pamięci RAM to coś rzędu miliarda gigabajtów pamięci RAM.
Dzięki 64-bitowej magistrali adresowej i szerokim, szybkim magistralom danych na płycie głównej, maszyny 64-bitowe oferują również szybsze prędkości we / wy (wejścia / wyjścia) na przykład dyski twarde i karty graficzne. Te funkcje mogą znacznie zwiększyć wydajność systemu.
Serwery zdecydowanie mogą skorzystać na 64 bitach, ale co z normalnymi użytkownikami? Poza rozwiązaniem RAM, nie jest jasne, czy 64-bitowy chip oferuje „zwykłym użytkownikom” jakiekolwiek realne, namacalne korzyści w tej chwili. Mogą szybciej przetwarzać dane (bardzo złożone dane zawierają wiele liczb rzeczywistych). Osoby zajmujące się montażem wideo i osoby zajmujące się obróbką zdjęć na bardzo dużych obrazach korzystają z tego rodzaju mocy obliczeniowej. Gry z wyższej półki również skorzystają na tym, gdy zostaną ponownie zakodowane w celu wykorzystania funkcji 64-bitowych. Ale przeciętny użytkownik, który czyta wiadomości e-mail, przegląda sieć Web i edytuje dokumenty programu Word, tak naprawdę nie używa procesora w ten sposób.
Aby uzyskać więcej informacji na temat mikroprocesorów i powiązanych tematów, sprawdź łącza na następnej stronie.
Powiązane artykuły
- Quiz CPU
- Dlaczego istnieją ograniczenia szybkości procesora?
- Jak działają półprzewodniki
- Jak działają komputery
- Jak działa programowanie w C.
- Jak działa Java
- Jak działają systemy operacyjne
- Jak działa pamięć komputera
- Jak będą działać komputery kwantowe
- Jak będą działać komputery DNA
Więcej świetnych linków
- Webopedia: mikroprocesor
- Kliknij opcję On CPU
- Aktualizacje procesorów
- Porównanie procesorów szóstej generacji
- Porównanie procesorów 7. generacji
- Wyniki testów porównawczych TSCP